

ąąśIą┬┬ä
─·Ą─«öŪ░╬╗ų├Ż║┤┼ĘŁ░Õę║╬╗ėŗ > ą┬┬äųąą─ > ąąśIą┬┬ä >
└ū▀_ę║╬╗ėŗĄ─ĮķĮBęį╝░į┌▓©└╦▒O£yųąĄ─æ¬ė├
š¬ę¬
š¬ę¬└ū▀_£yĖ▀āx│²┴╦é„ĮyĄ─£y▓©é„ĖąŲ„╚ńē║┴”▒ĒĪó▌d▓©ĖĪś╦ĪóļŖŲĮ▒ĒĄ╚═ŌŻ¼į┌▓©└╦▒O£yųąæ¬ė├įĮüĒįĮÅVĘ║ĪŻĮ±╠ņĖ„ĘN╔╠ė├└ū▀_Ė▀Č╚ėŗ▒╗ė├ū„ę║╬╗ėŗŻ¼└²╚ńį┌╗»īW╣żśIųąĪŻ═©▀^╦«▓█įć“ׯ¼ī”ā╔ĘN│Żė├Ą─ĪóārĖ±ŽÓī”Ą═┴«Ą─é„ĖąŲ„į┌▓©└╦▒O£yųąĄ─▀mė├ąį▀Mąą┴╦īŹ“×蹊┐ĪŻĄ┌ę╗éĆĘų╬÷▒Ē├„Ż¼ąĶę¬į┌┐šķg║═ĢrķgĘų▒µ┬╩ĘĮ├µĖ─▀M╔╠ė├└ū▀_Ė▀Č╚ėŗĪŻ«öĮ±é„ĖąŲ„Ą─│ŻęŖå¢Ņ}╩Ūįļ┬Ģ╦«ŲĮĖ▀Ż¼ąĶę¬▌^┤¾Ą─ŲĮŠ∙ķgĖ¶Ż¼ęį╝░é„ĖąŲ„š╝ė├┐šķg┤¾ĪŻ
ĮķĮB
į┌¼Fł÷║═į┌▓©┴„ųąī”▓©Ą─£y┴┐╩Ūė├▓╗═¼Ą─╝╝ąg▀MąąĄ─ĪŻ│Żė├é„ĖąŲ„═©▀^£y┴┐üĒ═Ų╦Ń╦«├µĖ▀│╠:
•é„ĖąŲ„(ē║┴”▒Ē)[1]╔ŽĘĮ╦«ų∙Ą─ē║┴”
•ĖĪų█į┌╦«├µ╔Žė╬äėĢrĄ─╝ė╦┘Č╚(▌d▓©ĖĪś╦)
•ā╔éĆĮī┘ļŖśOų«ķgĄ─╦«ų∙ļŖūĶ(ļŖę║▒Ē)
•¤oŠĆļŖ▓©├}ø_Å─é„ĖąŲ„ĄĮ╦«├µüĒ╗žĄ─é„▓źĢrķg╗“ā╔éĆ▀B└mĄ─¤oŠĆļŖ▓©ą┼╠¢ų«ķgĄ─ŽÓ╬╗▓ŅŻ¼ę╗éĆÅ─é„ĖąŲ„░l╔õĄĮ╦«├µŻ¼
┴Ēę╗éĆÅ─╦«├µĘ┤╔õĄĮé„ĖąŲ„(└ū▀_ę║╬╗ėŗ)[2]
┼cé„ĮyĄ─ē║┴”▒ĒĪóļŖŲĮ▒ĒĪó▌d▓©ĖĪ═▓Ą╚é„ĖąŲ„ŽÓ▒╚Ż¼└ū▀_ę║╬╗ėŗū„×ķę╗ĘN▀h│╠£y┴┐ŽĄĮyŻ¼ė╔ė┌▓╗ų▒ĮėĮėė|╦«¾w(▓╗┤µį┌Ė»╬gå¢Ņ}Ż¼é„ĖąŲ„▓╗╩▄▓©└╦ø_ō¶)Ż¼ę“┤╦Š▀ėąā×ä▌ĪŻ╚╗Č°Ż¼į┌╩╣ė├ś╦£╩└ū▀_ę║╬╗ėŗ▀Mąą║Ż└╦▒O£yĢr╚į┤µį┌ę╗ą®å¢Ņ}:
•ąĶę¬░▓čb(┼c│╦▓©ĖĪś╦ŽÓ▒╚)ĪŻ
•║Ż╦«Ą─¹}Č╚║═║Ż▒∙Ė▓╔wĢ■ė░Ēæ¤oŠĆļŖ▓©├}ø_į┌╦«ųąĄ─┤®═ĖĪŻ
•└ū▀_Ą─ūŃ█EŠ▀ėąŲĮŠ∙ą¦æ¬ĪŻ
•¤oŠĆļŖ▓©├}ø_Ą─Ę┤╔õ╚ĪøQė┌╦«├µĄ─Ų┬Č╚ĪŻ
ę“┤╦└ū▀_╦«ŲĮųĖś╦Ą─▀mė├ąįį┌▓©▓█▓©▒O£y£yįć“Schneiderberg”(ąŪŲ┌)║═“Großer Wellenkanal”(GWK) FRANZIUS-INSTITUTį┌ØhųZ═■,Ą┬ć°,▒╚▌^é„ĮyĄ─ļŖäė╦«ŲĮųĖś╦(GHM▓©Ė▀ėŗ,╬„│Ū┤·Ā¢Ę“╠ž)┼cā╔ĘN▓╗═¼Ą─╔╠śI└ū▀_╦«ŲĮųĖś╦(VEGAPLUS,┐Ś┼«ąŪ,KALESTO OTT)(łD2)ĪŻ
└Ēšō▒│Š░
└ū▀_ę║╬╗ėŗ╩Ū╗∙ė┌╔Ž╩÷ā╔ĘN▓╗═¼Ą─£y┴┐įŁ└Ēų«ę╗ĪŻ▀@ā╔éĆįŁ└Ē╚ńłD1╦∙╩ŠĪŻ
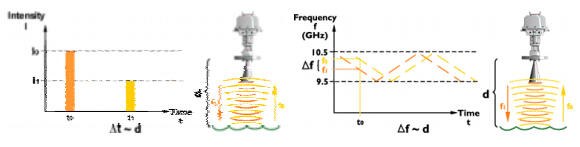
łD1╗∙ė┌└ū▀_├}ø_ąą│╠Ģrķg(ū¾)╗“š{ųŲ▀B└m└ū▀_▓©╩°ŽÓęŲ(ėę)[4]Ą─└ū▀_ę║╬╗ėŗ£y┴┐įŁ└Ē
ŠÓļx£y┴┐Ą─╣ŌīWĘĮĘ©Ą─▌^║åå╬Ą─ĘĮĘ©╩Ū┤_Č©Ą─▀\▌öĢrķg∆tČ╠├}ø_╣ŌĄ─Ę┤╔õĄ─▀h│╠─┐ś╦,╝┤╦«├µ(łD1(ū¾)ĪŻ╦«├µĄĮé„ĖąŲ„Ą─ŠÓļxdė╔
![]()
ęį╣Ō╦┘cĪŻę╗éĆĖ▀Š½Č╚£y┴┐╦∙ąĶĄ─Ģrķg6.6⋅10 - 12 s«a╔·ŠÓļx╚²├ūĄ─Ęų▒µ┬╩ĪŻ
ę╗ĘNĖ³Š½┤_Ą─ĘĮĘ©╩Ū└¹ė├╣ŌīWŽÓ╬╗£yŠÓĪŻī”░l╔õĄ─▀B└m¤oŠĆļŖ▓©Ą─Ņl┬╩▀Mąąš{ųŲŻ¼╚ńłD1(ėę)╦∙╩ŠĪŻę“┤╦ŽÓęŲ∆fų«ķgĄ─Ę┤╔õ▓©Įė╩š║═░l╔õ▓©░l╔·ĪŻīó░l╔õą┼╠¢┼cĘ┤╔õą┼╠¢╗ņ║ŽŻ¼Ą├ĄĮĄ═Ņlą┼╠¢(┼─Ņl)Ż¼┐╔╠ß╣®Ė▀Š½Č╚[5]ŠÓļxdĄ─īŹ£yųĄ:
![]()
į┌š{Ņlš{ųŲŅl┬╩║═∆fmax░l╔õÖCŅl┬╩Ą─Ų½▓ŅĪŻ
ā╔ĘN└ū▀_ę║╬╗ėŗį┌Š∙┘|Ę┤╔õ├µ[6]Ą─ŪķørŽ┬Ż¼į┌0 ~ 30mĘČć·ā╚Ą─ę║╬╗£y┴┐Š½Č╚Š∙┐╔▀_1mmĪŻī”ė┌┤ų▓┌Ą─▒Ē├µŻ¼└²╚ń▓╗ęÄät▓©└╦Ą─╦«├µŻ¼ė╔ė┌╣Ō╩°╩▄▒Ē├µ┤ų▓┌Č╚[7]Ą─āAĮŪĄ─š{╣ØŻ¼£y┴┐š`▓Ņį÷┤¾ĪŻ
įć“×čbų├
łD2’@╩Š┴╦░▓čbį┌WKS║═GWKųąĄ─▓╗═¼é„ĖąŲ„ĪŻ├┐éĆ└ū▀_é„ĖąŲ„Č╝┐┐Į³é„ĮyĄ─GHMé„ĖąŲ„Ż¼ęį▒Ńī”£y┴┐ŽĄĮy▀Mąą▌^ā×▒╚▌^ĪŻ
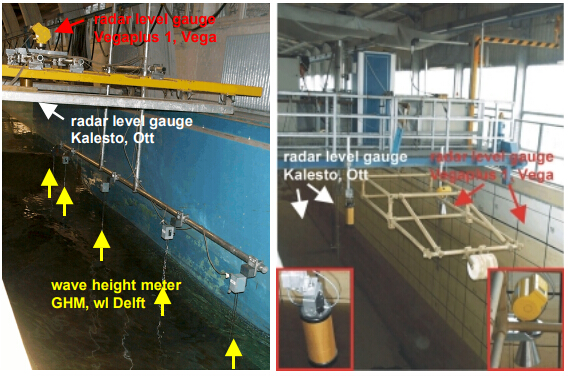
łD2╦«▓█WKS(ū¾)║═GWK(ėę)īŹ“×įOų├
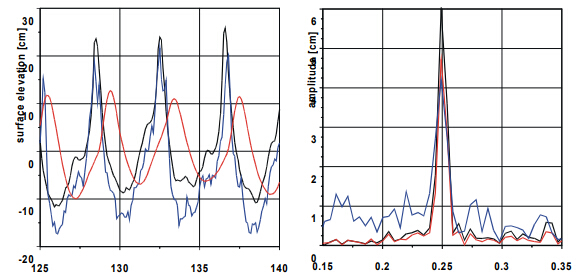
łD3│ŻęÄ▓©ŪķørŽ┬GHM▓©Ė▀āx(║┌╔½)ĪóVEGAPLUS└ū▀_é„ĖąŲ„(╝t╔½)ĪóKALESTO└ū▀_é„ĖąŲ„(╦{╔½)Ģrė“(ū¾é╚)║═Ņlė“(ėęé╚)£yĄ├Ą─╦«╬╗Ė▀│╠(d = 0.80 m, H = 0.30 m, T = 4 s)
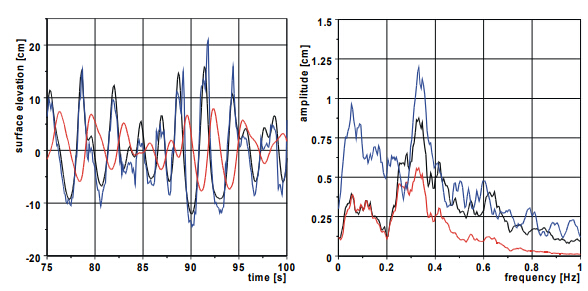
łD4▓╗ęÄät▓©ŪķørŽ┬GHM▓©Ė▀āx(║┌╔½)ĪóVEGAPLUS└ū▀_ę║╬╗ėŗ(╝t╔½)ĪóKALESTO└ū▀_ę║╬╗ėŗ(╦{╔½)Ģrė“(ū¾é╚)║═Ņlė“(ėęé╚)£yĄ├Ą─╦«╬╗Ė▀│╠(d = 0.80 m, Hs = 0.25 m, Tp = 3 s)ī”āxŲ„▀Mąą┴╦▓╗═¼▓©└╦Śl╝■(▓©Ė▀Īó▓©ų▄Ų┌ĪóęÄät▓©/▓╗ęÄät▓©)║═╦«╬╗Ą─£yįćĪŻWKSĄ─ģóöĄ╝»░³└©0.80 m - 1.00 mĄ─╦«╬╗Īó0.05 m - 0.40 mĄ─▓©Ė▀║═1 s - 6 sĄ─▓©ų▄Ų┌ĪŻį┌GWKųąŻ¼į┌╦«╬╗×ķ3.00 m - 5.00 mŻ¼▓©Ė▀×ķ0.60 m - 1.20 mŻ¼▓©ų▄Ų┌×ķ3.5 s - 9.5 sĄ─ŪķørŽ┬Ż¼ī”é„ĖąŲ„Ą─ąą×ķ▀Mąą┴╦蹊┐ĪŻłD3×ķęÄät▓©║═łD4×ķ▓╗ęÄät▓©Ż¼Įo│÷┴╦WKSųą▓╔╝»Ą─öĄō■╝»╩Š└²ĪŻ▀@ā╔éĆ└²ūėĘųäeį┌Ģrė“(ū¾)║═Ņlė“(ėę)Įo│÷ĪŻ
▓╗═¼é„ĖąŲ„£yĄ├Ą─Ąž├µĖ▀│╠ĢrķgłDļm╚╗į┌┘|┴┐╔ŽŽÓ═¼Ż¼Ą½į┌öĄ┴┐╔Ž┤µį┌▌^┤¾▓Ņ«ÉĪŻłD3(ū¾)Įo│÷┴╦æ¬ė├└ū▀_ę║╬╗ėŗ┤µį┌Ą─å¢Ņ}Ą─│§▓ĮėĪŽ¾Ż¼╚ńKALESTO└ū▀_Ą─ą┼╠¢╝ŌĘÕŻ¼╩Ūė╔ė┌ą┼įļ▒╚▓ŅŻ¼ŽÓęŲęį╝░VEGAPLUS£yĄ├Ą─▓©Ę∙£pąĪįņ│╔Ą─ĪŻ║¾š▀╩Ū═©▀^VEGAPLUSĄ─ā╚▓┐×V▓©üĒ╠ßĖ▀ą┼įļ▒╚ĪŻį┌Ņlė“(łD3(ėę)║═łD4(ėę))Ż¼KALESTOå¢Ņ}«a╔·Ą─░ūįļ┬Ģī¦ų┬┴╦ī”Ąž▒ĒĖ▀│╠ūVĘ∙ųĄĄ─Ė▀╣└Ż¼Č°VEGAPLUSå¢Ņ}ī¦ų┬┴╦ī”ūVĘ∙ųĄĄ─Ą═╣└ĪŻ└ū▀_é„ĖąŲ„┐╔ęį£╩┤_Ąž£y┴┐▓©ų▄Ų┌║═ūVĘÕĪŻ
GHMé„ĖąŲ„║═└ū▀_é„ĖąŲ„Ą─Ų½▓Ņ╚ĪøQė┌▓©Ą─╠žąįĪŻŽ┬├µĘųäeī”▓╗═¼é„ĖąŲ„Ą─ŲĮŠ∙▓©Ė▀╗“ĘÕųĄĘ∙ųĄĄ─é„▀f║»öĄ▀Mąą┴╦įö╝ÜĄ─Ęų╬÷ĪŻ▓╔ė├Üw┴Ń┤®įĮĘ©į┌Ģrė“ā╚┤_Č©┴╦ŲĮŠ∙▓©Ė▀ĪŻķōųĄ∆▒╗▀x×ķ4%Ą─ėąą¦▓©Ė▀Hsš±Ę∙ūV─Ļ┤·Ą─ėŗ╦Ń(f):
![]()
┼c▒Ē├µĖ▀│╠ζiĄ─ļx╔óĢrķgą“┴ąĪŻ
ĮY╣¹
łD2×ķęÄät▓©Ż¼łD3×ķ▓╗ęÄät▓©Ż¼Įo│÷┴╦▓©ų▄Ų┌ī”GHMé„ĖąŲ„┼c└ū▀_é„ĖąŲ„£yĄ├Ą─▓©Ė▀▒╚Ą─ė░ĒæĪŻ
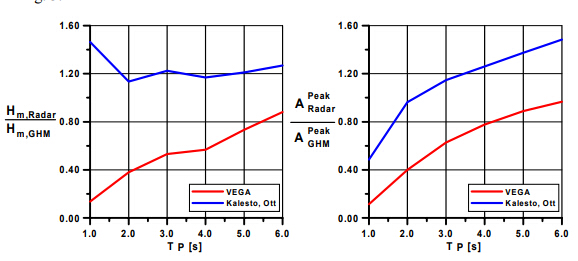
łD5│ŻęÄ▓©ŪķørŽ┬(H = 0.20 m)Ż¼└ū▀_ę║╬╗ėŗ£yĄ├Ą─▓©Ė▀┼cGHM▓©Ė▀ėŗĘų╬÷Ą├ĄĮĄ─Ģrė“(ū¾)║═Ņlė“(ėę)▓©Ė▀▒╚
łD6└ū▀_ę║╬╗ėŗ£yĄ├Ą─ėąą¦▓©Ė▀┼cĮøĢrė“(ū¾)║═Ņlė“(ėę)Ęų╬÷Ą├ĄĮĄ─GHM▓©Ė▀ėŗ£yĄ├Ą─▓╗ęÄät▓©Ė▀ų«▒╚(Hs = 0.15 m)
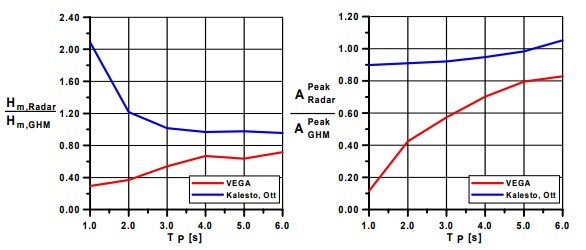
KALESTO(╦{╔½)Ė▀╣└┴╦ė╔Üw┴Ń┤®įĮĘ©┤_Č©Ą─ŲĮŠ∙▓©Ė▀ĪŻī”ė┌ęÄät▓©Ż¼Å─HmĪóRadar/HmĪóGHM = 1.3ĄĮ1.2Ż¼ī”ė┌▓╗ęÄät▓©(JONSWAPūV)Ż¼Å─HmĪóRadar/HmĪóGHM = 2.0ĄĮ1.0Ż¼ļSų°▓©ų▄Ų┌T╗“TpÅ─1 sį÷╝ėĄĮ6 sŻ¼Ė▀╣└Ą─│╠Č╚ĮĄĄ═ĪŻĘų╬÷Ę∙ųĄūVųąĄ─ĘÕųĄĢrŻ¼┐©╦╣═ąī”Ą═▓©ų▄Ų┌Ą─Ę∙ųĄ╣└ėŗ▀^Ą═Ż¼ī”Ė▀▓©ų▄Ų┌Ą─Ę∙ųĄ╣└ėŗ▀^Ė▀ĪŻļm╚╗▓╗ęÄät▓©Ą─ūVĘ∙▒╚ūā╗»▓╗┤¾Ż¼Ą½ęÄät▓©Ą─ūVĘ∙▒╚į┌0.5ĄĮ1.5ų«ķgĪŻ
┼cKALESTOŽÓ▒╚Ż¼VEGAPLUS┐é╩ŪĄ═╣└ŲĮŠ∙▓©Ė▀║═ūVĘ∙ųĄĪŻŲĮŠ∙▓©Ė▀▒╚║═ūVĘ∙ųĄ▒╚Å─╝sxķ_╩╝Ęųäeį÷┤¾ĪŻį┌ėąęÄät▓©Ą─ŪķørŽ┬Ż¼Å─0.15ĄĮ0.95Ż¼Å─┤¾╝sxĪŻ0.10 ~ 0.80Ż¼▓©ų▄Ų┌ė╔1 sį÷╝ėĄĮ6 sĪŻ
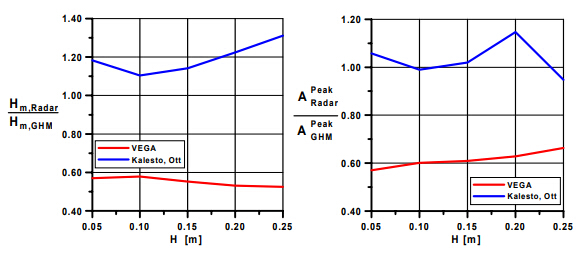
łD7│ŻęÄ▓©ŪķørŽ┬(T = 3 s)Ż¼└ū▀_ę║╬╗ėŗ£yĄ├Ą─ėąą¦▓©Ė▀┼cGHM▓©Ė▀ėŗį┌Ģrė“(ū¾)║═Ņlė“(ėę)Ęų╬÷Ą├ĄĮĄ─ėąą¦▓©Ė▀▒╚ųĄ
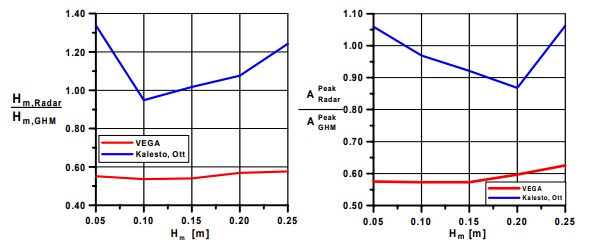
łD8└ū▀_╦«£╩āx£yĄ├Ą─ėąą¦▓©Ė▀┼cGHM▓©Ė▀ėŗĘų╬÷Ą├ĄĮĄ─▓╗ęÄät▓©Ģrė“(ū¾)║═Ņlė“(ėę)Ą─ėąą¦▓©Ė▀▒╚ųĄ(Tp = 3 s)
▓©Ė▀ī”ŲĮŠ∙▓©Ė▀▒╚║═ūVĘ∙ųĄĄ─ė░ĒæąĪė┌▓©ų▄Ų┌Ą─ė░ĒæŻ¼łD7×ķęÄät▓©Ż¼łD8×ķ▓╗ęÄät▓©ĪŻ▓©Ė▀║═š±Ę∙Ą─▒╚ųĄ╣ŌūVĄ─ĘÕųĄ┤¾╝s╩ŪVEGAPLUS│ŻöĄ(≈0.55)ĪŻKALESTOĄ─ūā╗»ĘČć·į┌0.9ĄĮ1.3ų«ķgĪŻ
╚ń╔Ž╦∙╩÷Ż¼╔Ž╩÷ą¦æ¬┼cKALESTOĄ─ą┼įļ▒╚▌^Ą═ęį╝░VEGAPLUSĄ─×V▓©ėąĻPĪŻ╠ņŠĆĄ─┐ūÅĮįĮ┤¾Ż¼└ū▀_▓©╩°į┌║Ż├µ╔ŽĄ─ūŃ█EįĮąĪŻ¼┐╔ęįĖ─╔Ų×V▓©╠žąįĪŻ╩╣ė├Ė³Ė▀Ą─¤oŠĆļŖŅl┬╩(╚ń24 GHzČ°▓╗╩Ū9 GHz[8])ę▓─▄½@Ą├═¼śėĄ─ĘĮŽ“ąįĖ─╔ŲĪŻ
ĮYšō
VEGAPLUS║═KALESTO└ū▀_ęč┐╔ė├ė┌£y┴┐ŠÅ┬²╦«╬╗ūā╗»(╦«╬╗▒Ē/│▒Ž½▒Ē)[9]Ż¼Ą½▓╗Š▀éõé„▌ö╣”─▄Ż¼╔ą▓╗─▄ė├ė┌▓©└╦▒O£yĪŻ╬┤üĒį┌FRANZIUS-INSTITUT▓©└╦┴„ł÷ėŗäØĄ─īŹ“×īóėąų·ė┌┐╦Ę■▀@ę╗▓╗ūŃŻ¼╠žäe╩Ū═©▀^Ė─╔Ų└ū▀_╠ņŠĆĄ─ĘĮŽ“ąįĪŻ
- [╣½╦Šą┬┬ä] ┤┼ĘŁ░Õę║╬╗ėŗėą£y┴┐├żģ^åß 2021-12-06
- [ąąśIą┬┬ä] ▓Ņē║ūā╦═Ų„įōį§├┤ŠSūo 2021-11-29
- [ąąśIą┬┬ä] ĖĪŪ“ę║╬╗ėŗ▒ŻBĢrūóęŌ╩┬ĒŚ 2021-11-25
- [╣½╦Šą┬┬ä] ┤┼├¶ļp╔½ę║╬╗ėŗ┼c┤┼ĘŁ░Õę║╬╗ėŗėą╩▓├┤ģ^äe 2021-11-16
- [╣½╦Šą┬┬ä] įņ│╔┤┼ĘŁ░Õę║╬╗ėŗā╚ĖĪūėŽ┬│┴Ą─│ŻęŖįŁę“Č╝ 2021-11-10
- [ąąśIą┬┬ä] ▓Ż┴¦╣▄ę║╬╗ėŗĄ─æ¬ė├ 2020-08-01
- [╝╝ągīŻŅ}] ╩»ė═ā”╣▐ę║╬╗£y┴┐▀xō±└ū▀_ę║╬╗ėŗ║¾Ą─░▓čb 2012-10-26
- [╝╝ągīŻŅ}] └ū▀_ę║╬╗ėŗ░▓čbę¬Ū¾ 2012-10-21
- [╝╝ągīŻŅ}] │¼┬Ģ▓©ę║╬╗ėŗĄ─ā׳c║═ŪÕŽ┤ĘĮ╩Į 2012-10-20
- [╝╝ągīŻŅ}] į§śė▀x┘ÅĖ▀£žĖ▀ē║ą═┤┼ĘŁ░Õę║╬╗ėŗ 2012-10-20